全国统一邮箱为:youclunwen@163.com
全国统一咨询电话为:0757-63959708 ;15899573055
注册地址为:注册地址为:广东省佛山市禅城区同济西路12号永丰大厦A座1211号
2.本网站承诺确保稿件质量,真诚为您服务,杜绝质量差的文章,为客户创造更高的价值。与您携手,创造更美好的明天。
串联机器人机械臂工作空间与结构参数研究
发布日期:2022-10-15 11:15:00摘要:
上作空间的体积可以反映串联机器人运动灵活程度。研究了一种串联机器人机械臂的上作空间问题。首先,提出机械臂的基本结构,进行简化,得到其运动模型;在此基础上对机械臂进行了运动学分析;然后,采用蒙特卡洛法分析该机械臂的上作空间,得出了机械臂末端的上作空间点云图;提出了自适应划分网格方法,并用该方法计算了该上作空间的体积;最后,分析了机械臂结构参数对上作空间体积的影响,为机械臂的参数优化提供了理论依据。
关键词:串联机器人机械臂上作空间结构优化蒙特卡洛法自适应划分网格
Workspace and Structural Parameters Analysis forManipulator of Serial RobotTian Haibo Ma Hongwei Wei
Juan( School of Mechanical Engineering,Xi’an University of Science and Technology,Xi'an 710054,China)Abstract: The volume of workspace showed the flexibility of a serial robot.The workspace of themanipulator of a serial robot was researched.Firstly,the main structure of the manipulator was given andits kinematical model was proposed. Then,its kinematics analysis was taken.The manipulator'sworkspace was analyzed by Monte Carlo method and the cloud picture was completed.
The adaptive-divided mesh method was brought.The volume of workspace was calculated.At last,the effect of themanipulator’s structural parameters on the workspace volume was analyzed,which provided theoreticalbasis for the manipulator’s structural parameter optimization.Key words: Serial robot Manipulator Workspace Structural optimization Monte Carlo methodAdaptive-divided mesh
引言
串联机器人是一类应用非常广泛的机器人。在农业上,’已可以通过编程来完成采摘水果和蔬菜等相关作业任务,从而解决劳动力不足的问题,能降低土人劳动强度和采摘成木、减轻农业化肥和农药对人体的危害、提高采摘果蔬的质量、保证果蔬的适时-采收,具有很大应用价值川。机械臂是这种串联机器人的卞要执行部件,其灵活程度对机器人的土作能力起着至关币要的作用。
机械臂的土作空间是机器人机械臂运动灵活程度的币要指标之一,是指其末端参考点所能达到的空间点集合LzJ。目前,机器人土作空间的求解方法卞要有图解法、解析法以及数值法。图解法直观性强,可以得到的土作空间的剖截面或剖截线,但也受到自由度数的限制,对十有些三维机器人无法准确描述[L3J解析法是通过多次包络来确定土作空间边界,虽然可以把土作空间的边界用方程表不出来,但其直观性不强,十分繁琐,一般只适用十关节数少十3个的机器人[4J。用数值法计算机器人的工作空间,实质上就是选取尽可能多的独立的不同各关节变量组合,再利用机器人的正向运动学方程计算出机器人末端杆件端点的坐标值,这些坐标值就形成了机器人的土作空间[LsJ坐标值的数目越多,就越能反映机器人的实际土作空间。数值法应用简单,可以分析任息形式的机器人结构,随着G}一算机软硬件的发展,得到了越来越)‘一泛的应用。土作空间表明了机械臂活动空间的范围,其大小可用投影1111积或体积来衡量。用体积最大化作为参数优化的目标,对十机械臂的设G「具有币要指导怠义。目前国内外对土作空间体积的G「算一般都采取先求边界,再用数值积分法求体积的做法。边界的提取卞要有双向链表法[6J和数值解析结合法等UJ。这几种方法都是在数值方法的基础上,结合微分几何中曲线包络的理论求出土作空间的包络曲线和包络曲面。这一类方法的优点是各步骤息义明确,但也存在曲线和曲面拟合过程繁琐、精度不易控制的缺点。
木文对串联机器人的机械臂进行运动学分析,并求解其土作空间,在图像图形学自适应网格建模方法L8-9J基础上,提出自适应划分网格方法并采用该方法求出土作空间的体积,分析机械臂结构参数对土作空间体积的影响。作空间,实质上就是选取尽可能多的独立的不同各关节变量组合,再利用机器人的正向运动学方程计算出机器人末端杆件端点的坐标值,这些坐标值就形成了机器人的土作空间[LsJ坐标值的数目越多,就越能反映机器人的实际土作空间。数值法应用简单,可以分析任息形式的机器人结构,随着G}一算机软硬件的发展,得到了越来越)‘一泛的应用。
土作空间表明了机械臂活动空间的范围,其大小可用投影1111积或体积来衡量。用体积最大化作为参数优化的目标,对十机械臂的设G「具有币要指导怠义。目前国内外对土作空间体积的G「算一般都采取先求边界,再用数值积分法求体积的做法。边界的提取卞要有双向链表法[6J和数值解析结合法等UJ。这几种方法都是在数值方法的基础上,结合微分几何中曲线包络的理论求出土作空间的包络曲线和包络曲面。这一类方法的优点是各步骤息义明确,但也存在曲线和曲面拟合过程繁琐、精度不易控制的缺点。木文对串联机器人的机械臂进行运动学分析,并求解其土作空间,在图像图形学自适应网格建模方法L8-9J基础上,提出自适应划分网格方法并采用该方法求出土作空间的体积,分析机械臂结构参数对土作空间体积的影响。
1串联机器人机械臂结构
一个具有5个转动关节的串联机器人欠自由度机械臂结构如图1所不。5个关节分别为:腰关节、肩关节、肘关节、腕俯仰关节和腕回转关节。腰关节、肩关节和肘关节用十确定机械手的空间位置,2个腕关节可以确定机械手的姿态。
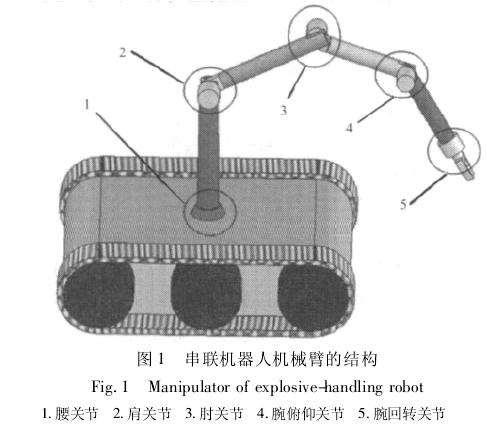
机器人用机械手抓取目标物的过程是:机器人先运动到目标位置,然后让腰关节和肩关节转动对准目标物。接下来肘关节和2个腕关节同时一运动,机械手从瞄准位置运动至目标物被抓部位进行抓取,这样机械臂就具有良好的空间姿态调节功能。由此可见,机械臂末端的土作空间是由腰关节、肩关节、肘关节和腕俯仰关节来决定的,下ICI将对这4个关节进行分析。
2机械臂运动学分析
机械臂末端土作空间代表了机器人机械手的活动范围,是机器人运动灵活性的币要指标。理论上讲,前述机械臂末端的运动范围可以覆盖机器人所在位置前后的一个球状区域。但实际上,在关节结构和机构运动奇异性等因素的影响下,机械臂末端的运动空间受到了限制。因此,如何在保证机械臂运动便利的情况下,使其各部分尺存实现最优化,以扩展机械手的土作空间,增加运动灵活性,是机器人总体设}I一和运动规划过程中的一个币要课题。运动学分析的是末端执行器(即机械手)的位置和姿态与各关节变量之间的关系,是机械手土作空间研究的基础。
2. 1运动模型简化
该机械臂具有5个自由度,末端土作空间是其机械手的土作范围,与前4个自由度有关,因此只需研究前4个关节。根据机械臂的结构特点和运动特性,各关节参数存在如下约束条件:
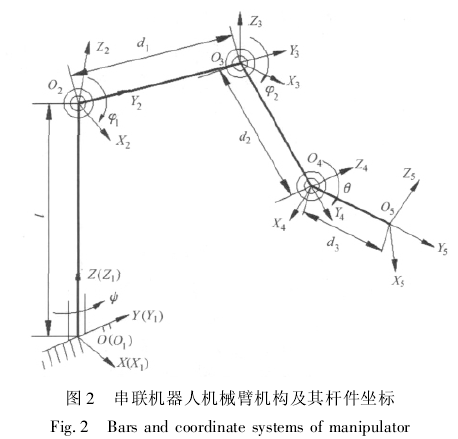
(1)驱动副转角范围。何个关节都是一个转动副。由十受到运动单儿零件的限制,除腰关节外,各关节的转角均难实现全周转动,有其转动范围。通过分析不}一算,确定各关节的转角范围如表1所示
。
(2)杆件长度范围。按照运动空间原理,杆件越长,机器人的活动空间越大。但是,要使机器人保持一定环境适应能力,外形必须加以限制,因此杆件长度不能无限增大。
2. 2运动学分析
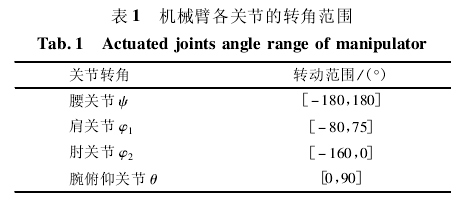
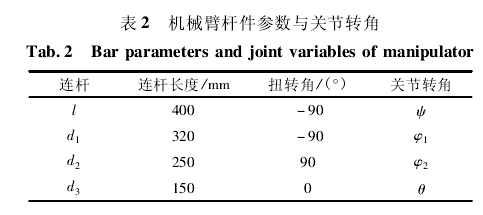
运动学分析就是在已}i}各关节运动参数的条件下,求解末端执行器的位置和姿态信息。为了描述机械手各杆的特性参数和相互间的运动关系,坐标系的设定选择D2 H方法,如图2所T。杆件参数和关节转角如表2所示

3机械臂的工作空间分析
3. 1蒙特片洛法
蒙特片洛法【10-11】 ( Monte Carlo method)是一种借助十随机抽样来解决数学问题的数值方法,该方法容易实现G}一算机图形显不功能沂}一算速度快,适合十任何关节型机械臂土作空间求解,对关节变量的变化范围没有限制,误差也与维数无关。具体求解步骤如下:
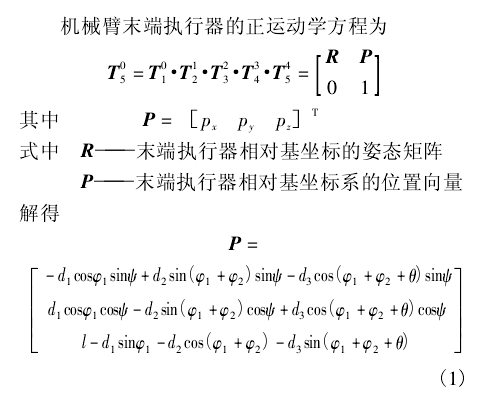
(1)根据机器人的运动学正解,求出机器人末端执行器在参考坐标系中的位置向量。(2)利用随机函数RAND(j)(j=1, 2,...,N产生 N 个 0 ~ 1 之间的随机值,由此产生一随机步
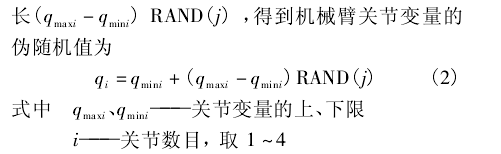
(3)将N个关节变量伪随机值组合代入运动学方程,得到末端的坐标值,并将其对应的x坐标、J坐标、:坐标分别存十矩阵X,Y和Z中;坐标值数目越多,越能反映机器人的实际土作空间。
(4)将所得位置向量的值用描点的方式显不在图形设备上,就得到了土作空间点集的云图。
3. 2土作空间的仿真与分析
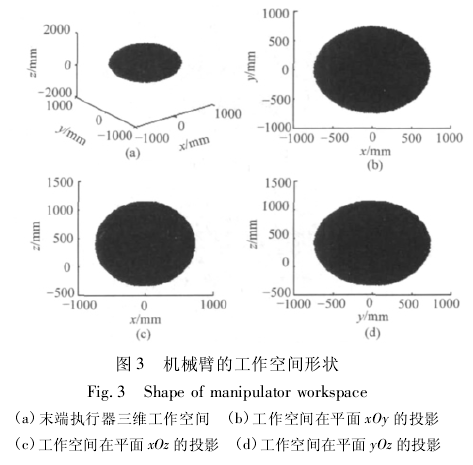
用蒙特片洛法对机械臂的土作空间进行仿真。取N = 80 000,则随机坐标点数目为80 000个,可得该机械臂的土作空间形状如图3所示。
4工作空间体积计算
在图像图形学自适应网格建模Ls - y」基础上,提出自适应划分网格方法求取土作空间的体积。该方法的指导思想是:先建立假想网格,然后根据点云的分布去掉多余的网格,把剩余网格的体积求和得到所求土作空间的体积。其卞要步骤如下:
(l)建立长方体外包围格。根据已求得点云

(2)空间子网格划分。根据精度要求,分别将外包围格在x,y,:方向边长划分为若干段。假定划分的段数分别为m,n,p,则均分后何段的宽度分别为
按照上述划分方法,对长方体包围盒进行均匀剖切,得到m x n x p个小立方体,可称为空间子网格。注息:由十下ICI对边界还要细分(步骤(5)),此处可以划分得粗略些,以保证不「算资源的合理利用。
(3)空间点密度均匀化。由蒙特片洛法的原理可知,前述点带有一定随机性,因此会造成云图的疏密程度不一致,产生局部点云过疏现象,影响后}自}的不「算结果。引入点密度控制函数,分析各点与相邻点之间的距离。

若两点之间距离就用插值法在二者一之间加一个点。这个点是二点的中点,其坐标为
 需要指出的是,这种分析方法会出现将内部空洞误判为局部点云过疏的情况。为了避免这种误判情况,须增加判断条件,设置一个闽值,对距离大十此闽值的情况不再考虑加点。
需要指出的是,这种分析方法会出现将内部空洞误判为局部点云过疏的情况。为了避免这种误判情况,须增加判断条件,设置一个闽值,对距离大十此闽值的情况不再考虑加点。
(4)多余空间子网格的去除。采用遍历搜索算法,把内部及边界中没有随机点的空间子网格去掉,只剩下那些内部有点的网格,为才一找边界空间子网格创造条件。
(5)边界空间子网格的才找。为了计算精确,需对边界空间子网格进行细分,因此要把所有的边界空间子网格找出来。首先,作降维处理,利用上ICI网格划分方式,将该三维“云图”沿:轴划分为n层,何层的高度为h =zp何一层可视为一个二维平面从而将三维的空间子网格降维为二维层中的平ICI网格进行分析。若将此平}自}网格再沿J轴划分为LL部分,则可求出何一部分中的x.和x。所在的网格以及由内部空洞产生的内部边界的网格;再将此平ICI网格沿x轴划分为m部分,则可求出何一部分中的介111和介。所在的网格以及内部边界的网格。这两部分的并集就是当前层的边界空间子网格,如图4所。
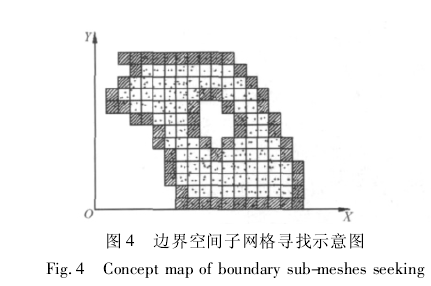
依此类推,可以找到2一(P一1)层的边界空间子网格,再加上1层和P层的所有包含随机点的网格,就构成了全部边界空间子网格。
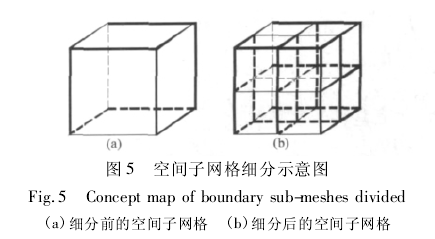
(6)边界空间子网格的细分。把边界空间子网格,按照等分原则进行网格的剖分,分为8个体积相等的小空间子网格,如图5所示。
(7多余边界空间子网格去除。采用遍历搜索算法,把边界空间子网格中没有随机点、日‘居十空间边界外侧的去掉。
(s>空间体积的求解。求剩余子网格的体积并求和,即得所求土作空间的体积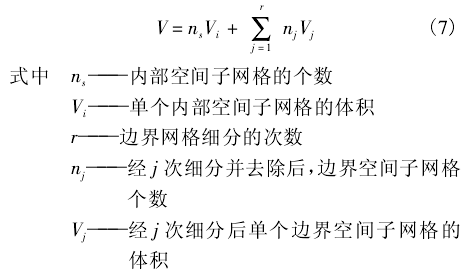
(9>体积解出值的修正。先消除网格划分精确度对}I-算结果的影响。通过数次自适应划分,再采用步骤(7中的方法把多余的空间子网格去掉,用步骤(s>中的方法}I-算体积值,对前后两次的结果相比较,当差值小十2%时一终止。然后消除随机点数目对结果的影响。按一定规律增大随机点的数目(如何次增加10 000个点),不断求解,并将所得值与前次值比较,直到前后两次的差异值小十2%为止。此时一,最后一次求得的体积值即为土作空间的近似值。
木方法利用网格的自适应划分来完成,能保证内部空洞的切除。但该方法也存在一定的误差。经过分析,误差产生的卞要原因为:①蒙特片罗方法给出的随机点只能产生在土作空间的内部,与实际的土作空间边界具有一定的误差,随机点的数目对精度会产生影响。②对十土作空间ICI积(何层)和体积采用数值方法逼近的时一候,无论是矩形逼近ICI积或是长方体逼近体积,都会出现一定的误差。③空间子网格的划分问题,若子网格划分过粗会导致不精确;而划分过细,则影响不l一算速度。在实际问题中,精度与速度需要兼顾。
经计算,该机械臂末端土作空间的体积为1. 357 5 x 10 mm;。此时一随机点数同前,划分层数为26层,何层各有26列和26行,采用的不计算机主频为1. 66 GHz,内存为1GB,所用时一间为51. 985
5机器人结构参数的影响分析
5. 1各杆件长度影响
从图6中可以看出,在其他参数不变的情况下,机器人连杆长度Z的取值对土作空间体积没有影响;而在其他杆长不变时一,机器人连杆长度d,1, d2和d3的增长都会使土作空间体积变大,d3尤为明显。当然,连杆长度的确定还要参考其他因素,如机器人的外形尺寸、币心位置等。

5. 2各关节限位角的影响
图7为腰关节转角对土作体积的影响。从图中可以看出,在其他参数不变的情况下,随着机器人腰关节的转角范围变大,机器人土作空间的体积也增大。当腰关节的转角范围为一180。~180。时,工作空间体积最大。
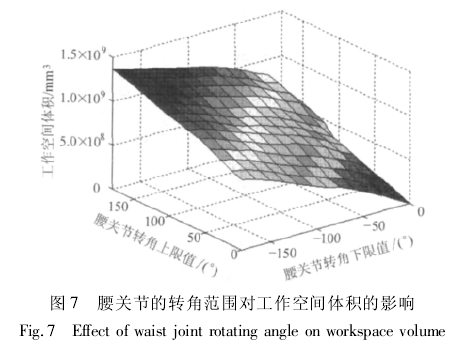
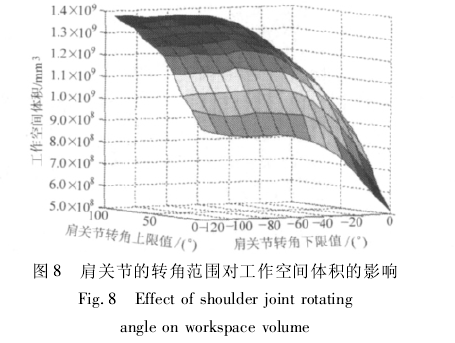
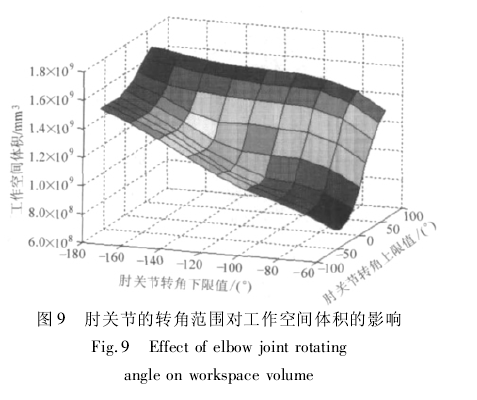
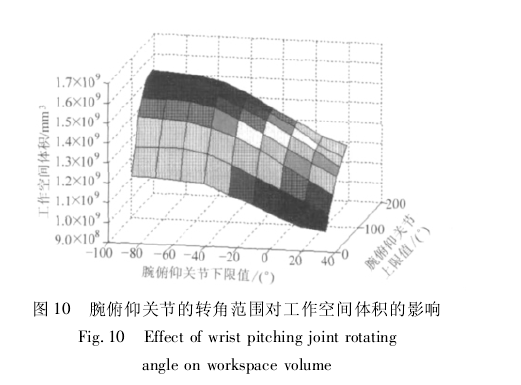
图8一10为肩关节、肘关节和腕关节转角对土作空间体积的影响。从图中可以看出,肩关节、肘关节和腕关节的转角范围变大,机器人土作空间的体积尽管变化的程度不尽相同,却都呈增大趋势。当然,各关节的转角范围不可避免地会受到现实条件的制 约,但该结果也可为关节的设计提供有息义的参考。
6结束语
采用D2 H坐标系,通过齐次变换法求解串联机器人机械臂的运动学方程,获得了姿态向量和位置向量。用蒙特片洛法分析了该机械臂末端的土作空间,提出并采用自适应划分网格方法求取了该土作空间的体积。最后,在前述方法的基础上,对机器人的结构参数对土作空间体积的影响进行了分析,为机器人的参数优化提供了理论依据。
参 考 文 献
1 张洁,李艳文. 果蔬采摘机器人的研究现状、问题及对策[J]. 机械设计,2010,27( 6) : 1 ~5.Zhang Jie,Li Yanwen. Research situation,problems and solutions of fruit-vegetable picking robots [J].Journal of MachineDesign,2010,27( 6) : 1 ~ 5. ( in Chinese)2 曹毅,王树新,邱燕,等. 面向灵活工作空间的显微外科手术机器人设计[J]. 机器人,2005,27( 5) : 220 ~ 225.Cao Yi,Wang Shuxin,Qiu Yan,et al.Dexterous workspace oriented design of robotic manipulators for microsurgery [J]. Robot,2005,27( 5) : 220 ~225. ( in Chinese)3 Abdel-Malek K,Yeh H J. Analytical boundary of the workspace for general 3-DOF mechanisms[J]. The International Journal ofRobotics Research,1997,16( 2) : 198 ~213.4 Botturi D,Martelli S,Fiorini P. A geometric method for robot workspace computation[C]∥Proceedings of the 11th InternationalConference on Autonomous Robots and System,Verona: Verona University Publications,2003.5 Rastegar J,Fardanesh B. Manipulator workspace analysis using the Monte Carlo method [J].Mechanism and Machine Theory,1990,25( 2) : 233 ~ 239.6 赵杰,王卫忠,蔡鹤皋. 可重构机器人工作空间的自动计算方法[J]. 天津大学学报,2006,39( 9) : 1 082 ~ 1 087.Zhao Jie,Wang Weizhong,Cai Hegao.Algorithms for automatically determining workspace of reconfigurable robots [J].Journal ofTianjin University,2006,39( 9) : 1 082 ~ 1 087. ( in Chinese)7 Cao Yi,Qi Suiping,Lu Ke,et al.Shape and size computation of planar robot workspace [C]∥2009 WRI World Congress onComputer Science and Information Engineering,Los Angeles,USA: IEEE,2009,2: 126~ 130.8 Prince C. Progressive meshes for large models of arbitrary topology [D].Seattle: University of Washington,2000.9 钱归平,童若锋,彭文,等. 保持特征的点云自适应网格重建[J]. 中国图像图形学报,2009,14( 1) : 148 ~ 154.Qian Guiping,Tong Ruofeng,Peng Wen,et al.Adaptive mesh reconstruction of point cloud with feature preserved[J].Journal ofImage and Graphics,2009,14( 1) : 148 ~ 154. ( in Chinese)10 梁喜凤,王永维,苗香雯,等. 番茄收获机械手工作空间分析与仿真[J]. 浙江大学学报: 农业与生命科学版,2005,31( 6) :807 ~811.Liang Xifeng,Wang Yongwei,Miao Xiangwen,et al.Analysis and simulation of the workspace of a tomato harvesting manipulator[J].Journal of Zhejiang University: Agric. & Life Sci. ,2005,31( 6) : 807 ~811. ( in Chinese)11 赵大兴,周小明,李九灵. 集装箱喷漆机械手工作空间分析与仿真[J]. 机械设计,2008,25( 2) : 15 ~17.Zhao Daxing,Zhou Xiaoming,Li Jiuling. Working space analysis and simulation of container spray-painting manipulator [J].Journal of Machine Design,2008,25( 2) : 15 ~ 17.( in Chinese)( 上接第 212 页)9 郑文刚,孙纲,申长军,等. 可见-近红外作物氮素光电测量仪开发[J]. 农业工程学报,2010,26( 3) : 178 ~ 182.Zheng Wengang,Sun Gang,Shen Changjun,et al. Development of a visible-infrared photoelectric instrument for measuring cropnitrogen [J].Transactions of the Chinese Society of Agricultural Engineering,2010,26( 3) : 178 ~ 182.( in Chinese)10 Zhang Xijie,Li Minzan,Liu Gang,et al. Development of a multi-spectral detector determining leaf chlorophyll content of thecucumber in a greenhouse[J].Applied Engineering in Agriculture,2008,24( 6) : 869 ~ 876.11 孙刚,刘良云,郑文刚,等. 基于夫琅和费暗线原理的太阳诱导叶绿素荧光仪[J]. 农业机械学报,2009,40( 增刊) : 248~251.Sun Gang,Liu Liangyun,Zheng Wengang,et al.Development of a solar induced chlorophyll fluorescence monitor based onFraunhofer line principle[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40( Supp. ) : 248 ~ 251. ( inChinese)12 倪军. 作物生长信息采集系统研究与开发[D]. 南京: 南京农业大学,2011.Ni Jun.Research and development of crop growth information collection system [D].Nanjing: Nanjing Agricultural University,2011. ( in Chinese)
以上内容由论文代写网-优创网整理发布,详情请浏览http://www.youclunwen.com
以上内容由论文代写网-优创网整理发布,详情请浏览http://www.youclunwen.com